



موقعیت یاب چرخشی افقی سه محوره / موقعیت یاب ربات جوشکاری
پارامترهای فنی
| موقعیت یاب سروو سه محوره با گردش عمودی | موقعیت یاب سروو سه محوره دوار افقی | ||||||
| شماره سریال | پروژهها | پارامتر | پارامتر | ملاحظات | پارامتر | پارامتر | ملاحظات |
| 1 | بار دارای امتیاز | ۵۰۰ کیلوگرم | ۱۰۰۰ کیلوگرم | در شعاع R400mm از محور دوم | ۵۰۰ کیلوگرم | ۱۰۰۰ کیلوگرم | در شعاع R400mm/R500mm محور دوم |
| 2 | شعاع گردش استاندارد اسپیندل | R1200 میلیمتر | R1500 میلیمتر | R1200 میلیمتر | R1800 میلیمتر | ||
| 3 | شعاع گردش استاندارد شفت مخالف | ۴۰۰ میلیمتر | ۵۰۰ میلیمتر | ۴۰۰ میلیمتر | ۵۰۰ میلیمتر | ||
| 4 | زاویه چرخش محور اول | ±۱۸۰ درجه | ±۱۸۰ درجه | ±۱۸۰ درجه | ±۱۸۰ درجه | ||
| 5 | زاویه چرخش محور دوم | ±۳۶۰ درجه | ±۳۶۰ درجه | ±۳۶۰ درجه | ±۳۶۰ درجه | ||
| 6 | سرعت رو به بالای نامی محور اول | ۵۰ درجه بر ثانیه | ۲۴ درجه در ثانیه | ۵۰ درجه بر ثانیه | ۲۴ درجه در ثانیه | ||
| 7 | سرعت چرخش نامی محور دوم | ۷۰ درجه در ثانیه | ۷۰ درجه در ثانیه | ۷۰ درجه در ثانیه | ۷۰ درجه در ثانیه | ||
| 8 | دقت موقعیت یابی را تکرار کنید | ±0.10 میلیمتر | ±0.20 میلیمتر | ±0.10 میلیمتر | ±0.20 میلیمتر | ||
| 9 | ابعاد مرزی قاب جابجایی (طول×عرض×ارتفاع) | ۲۲۰۰ میلیمتر × ۸۰۰ میلیمتر × ۹۰ میلیمتر | ۳۲۰۰ میلیمتر × ۱۰۰۰ میلیمتر × ۱۱۰ میلیمتر | ۲۲۰۰ میلیمتر × ۸۰۰ میلیمتر × ۹۰ میلیمتر | ۳۲۰۰ میلیمتر × ۱۰۰۰ میلیمتر × ۱۱۰ میلیمتر | ||
| 10 | ابعاد کلی شیفتر موقعیت (طول × عرض × ارتفاع) | ۴۰۰۰ میلیمتر × ۷۰۰ میلیمتر × ۱۶۵۰ میلیمتر | ۵۲۰۰ میلیمتر × ۱۰۰۰ میلیمتر × ۱۸۵۰ میلیمتر | ۴۰۰۰ میلیمتر × ۷۰۰ میلیمتر × ۱۶۵۰ میلیمتر | ۴۵۰۰ میلیمتر × ۳۶۰۰ میلیمتر × ۱۷۵۰ میلیمتر | ||
| 11 | ارتفاع مرکز چرخش محور اول | ۱۳۵۰ میلیمتر | ۱۵۰۰ میلیمتر | ۸۰۰ میلیمتر | ۱۰۰۰ میلیمتر | ||
| 12 | شرایط منبع تغذیه | سه فاز 200 ولت ± 10٪ 50 هرتز | سه فاز 200 ولت ± 10٪ 50 هرتز | سه فاز 200 ولت ± 10٪ 50 هرتز | سه فاز 200 ولت ± 10٪ 50 هرتز | دارای ترانسفورماتور ایزولاسیون | |
| 13 | کلاس عایق | H | H | H | H | ||
| 14 | وزن خالص تجهیزات | حدود ۱۸۰۰ کیلوگرم | حدود ۳۰۰۰ کیلوگرم | حدود 2000 کیلوگرم | حدود 2000 کیلوگرم | ||
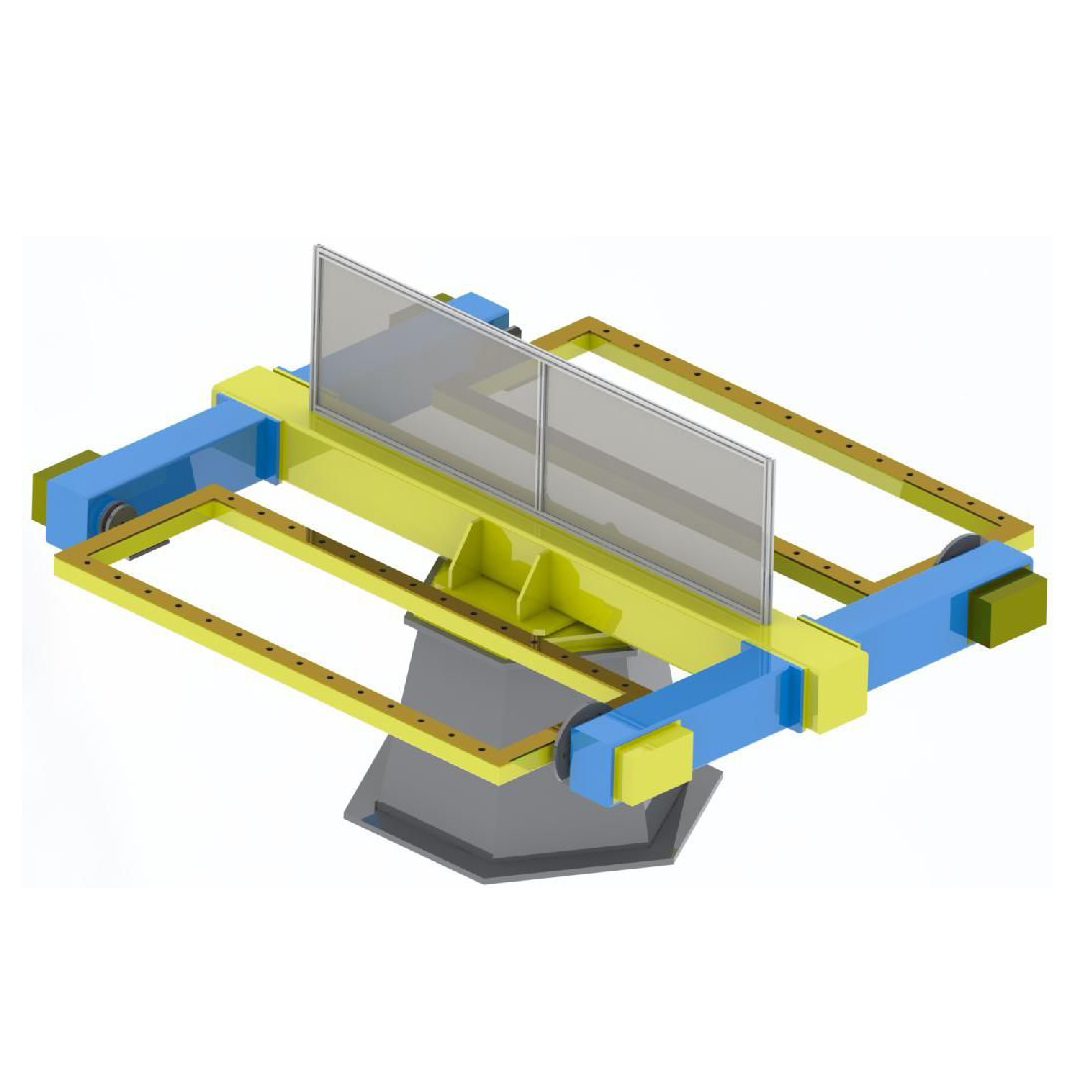
موقعیت یاب سروو سه محوره دوار افقی

موقعیت یاب سروو سه محوره با گردش عمودی
مقدمه ساختار
سروو پوزیشنر سه محوره عمودی چرخشی عمدتاً از قاب انتگرالی جوش داده شده، قاب جابجایی چرخشی، موتور سروو AC و کاهنده دقت RV، تکیه گاه چرخشی، مکانیزم رسانا، سپر محافظ و سیستم کنترل الکتریکی تشکیل شده است.
قاب یکپارچه جوش داده شده با پروفیلهای باکیفیت جوش داده شده است. پس از عملیات حرارتی و تنشزدایی، توسط ماشینکاری حرفهای پردازش میشود تا از دقت بالای ماشینکاری و دقت موقعیتهای کلیدی اطمینان حاصل شود. سطح با رنگ ضد زنگ اسپری میشود که زیبا و سخاوتمندانه است و رنگ آن را میتوان با توجه به نیاز مشتری سفارشی کرد.
قاب جابجایی چرخشی باید با فولاد پروفیل با کیفیت بالا جوش داده شده و با ماشینکاری حرفه ای پردازش شود. سطح آن باید با سوراخ های رزوه دار استاندارد برای نصب ابزار موقعیت یابی ماشینکاری شود و رنگ آمیزی و سیاه کاری و عملیات جلوگیری از زنگ زدگی انجام شود.
سروو موتور AC با کاهنده RV به عنوان مکانیزم قدرت انتخاب شده است که میتواند پایداری چرخش، دقت موقعیتیابی و
دوام طولانی و نرخ خرابی پایین. مکانیزم رسانا از برنج ساخته شده است که خاصیت رسانایی خوبی دارد. پایه رسانا دارای عایق یکپارچه است که میتواند به طور موثر از سروو موتور، ربات و منبع تغذیه جوشکاری محافظت کند.
سیستم کنترل الکتریکی از PLC ژاپنی Omron برای کنترل پوزیشنر استفاده میکند که عملکرد پایدار و نرخ خرابی پایینی دارد. قطعات الکتریکی از برندهای معروف داخلی و خارجی انتخاب شدهاند تا کیفیت و پایداری استفاده تضمین شود.
محافظ نورگیر با پروفیل آلومینیومی و صفحه پلاستیکی آلومینیومی مونتاژ شده است تا در برابر نور قوس الکتریکی ایجاد شده در حین جوشکاری و برش محافظت کند.








